| Characteristics | Description | |
|---|---|---|
| C1 | System under study | A Styrofoam box containing a lid, a heating element, and fan, controlled by a Raspberry Pi, for incubating tempeh. |
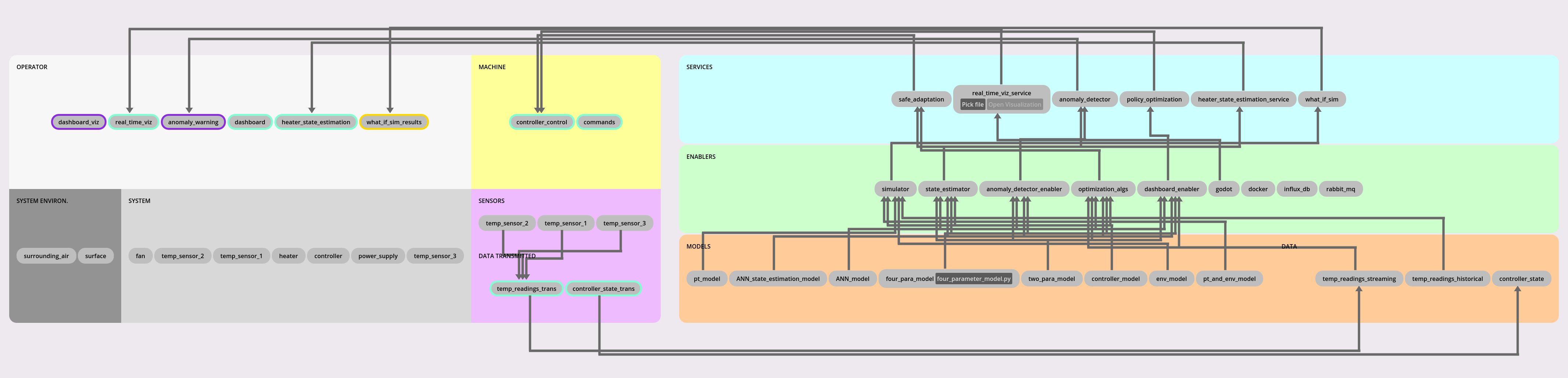
| C2 | Physical acting components | controller: Controls the fan and heater fan: Circulates air throughout box heater: Raises the temperature of surrounding air power_supply: Powers electrical components |
| C3 | Physical sensing components | temp_sensor_1 temp_sensor_2 temp_sensor_3 |
| C4 | Physical-to-virtual interaction | controller_state_trans temp_readings_trans |
| C5 | Virtual-to-physical interaction | The controller in the PT sends sensor and actuator data on a periodic basis over RabbitMQ. |
| C6 | DT services | safe_adaptation anomaly_detector real_time_viz_service policy_optimization heater_state_estimation_service what_if_sim |
| C7 | Twinning time-scale | Real-time Slower than real-time The DT-to-PT synchronization occurs every time the PT sends a message to the DT (on a periodic basis). Faster than real-time |
| C8 | Multiplicities | The current implementation has no multiplicities, however, it is possible to deploy multiple DTs for the same PT. |
| C9 | Life-cycle stages | The DT supports the design and the service phases. In the service phase, it supports creating, executing, saving, analyzing, evolving, and terminating. |
| C10 | DT models and data | Model: four_para_model pt_model ANN_state_estimation_model ANN_model two_para_model controller_model env_model pt_and_env_model Data: temp_readings_streaming temp_readings_historical controller_state |
| C11 | Tooling and enablers | simulator state_estimator anomaly_detector_enabler optimization_algs dashboard_enabler godot docker influx_db rabbit_mq |
| C12 | DT constellation | The orchestration of the system-as-a-whole is carried out by micro-services. These microservices set up the multiple components from configuration files, including the models and data, tools and enablers, services, and physical-to-virtual and virtual-to-physical interaction. It is possible to leave aside some of the micro-services when initializing the DT for testing purposes.. |
| C13 | Twinning process and DT evolution | The DT was engineered based on a joint engineering approach. For the evolution, 10 milestones have been defined: identifying the physics for the PT, building the plant models with, characterizing the heating power, building the first physical prototype, experimentally refining the parameters for the plant model, creating the controller model, deploying the controller code into the physical controller, deploying the visualization service, providing services for state estimation and anomaly detection, and providing the service for optimizing the control policy. |
| C14 | Fidelity and validity considerations | The models have been calibrated against experimental data and the predictive accuracy of the best model is within 2°C. The models have been validated in a controlled environment. |
| C15 | DT technical connection | The PT-to-DT connection is done over Wi-Fi on a laptop using RabbitMQ. |
| C16 | DT hosting/deployment | The Incubator DT is deployed locally on a LAN. |
| C17 | Insights and decision making | dashboard_viz anomaly_warning: anomaly detection real_time_viz: 3D visualization of the current state dashboard: dashboard visualization of the current state and historical data heater_state_estimation: state estimation of the heater what_if_sim_results: what-if analysis for future behavior under different controller configurations controller_control: control policy updates to the PT commands |
| C18 | Horizontal integration | There is horizontal integration with the micro-services of the Incubator DT. The DT is able to exchange information with other information systems over RabbitMQ. |
| C19 | Data ownership and privacy | Datasets have been provided online to the public. No privacy-related data are stored. |
| C20 | Standardization | Communication is carried out using AMQP standard via RabbitMQ. Behavioral models have been produced following the FMI standard version 2. |
| C21 | Security and safety considerations | Communication can be TLS encrypted through the RabbitMQ broker. The physical controller counts with a safety consideration that turns off system if the temperature read is above 60°C or if the network connection is unstable. |